to view our flickr set
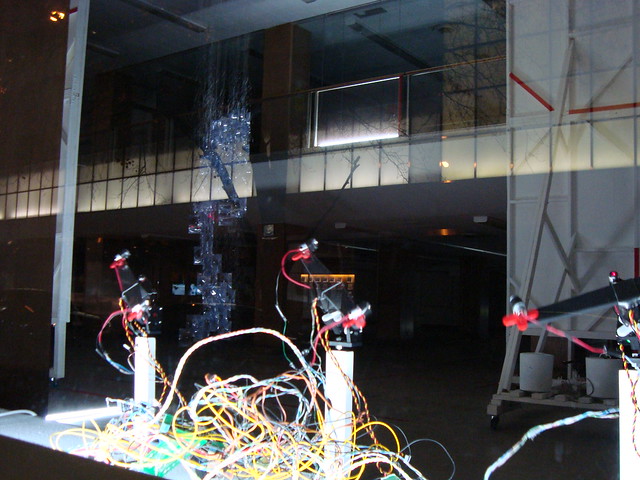
feedback f s f -r s ns is composed of two robots, and is in the form of a closed system with interlaced feedback, i.e, the output of one robot is the input of the other. the system generates visual compositions as the robots alter their environments and influence each others’ behaviors.
this project was shown at sequence of waves, in st. cecilia’s gallery, greenpoint, brooklyn, january 2011.
materials: various reflective and refractive media, micro-controllers, motors, lasers, sensors. 2011
in detail:
robot 1>>
senses: emf
output: slowly rotates a glass tumbler containing reflective/refractive media.
robot 2>>
senses light/motion
output: light, fluctuations in the emf field (via motor induction, phosphorescing of chemicals on the sensor of robot 1).
robot 1 is programmed to sense changes in the emf field around it and reposition a container of reflective/refractive media proportionally by spinning a motor.
robot 2 is composed of three servo/laser components programed to survey the surface of robot 1’s glass tumbler and define quadrants of highly reflective points on the tumbler’s surface.
robot 2 is programmed to draw straight lines with a laser on the curved, translucent, rotating surface of robot 1. the light from the lasers pass through a rotating tumbler (robot 1) filled with a mixture of reflective, and refractive media.
as the beams of light pass through the tumbler, their trajectories are refracted and the resulting altered beams strike a treated sensor plate and phosphoresce.
the phosphorescing and servo motor movement ripple the emf field and robot 1 spins the tumbler accordingly. the moving tumbler causes robot 2 to re-scan the surface of the tumbler, etc.